« Vol aux instruments » jusqu’à l’oreille interne
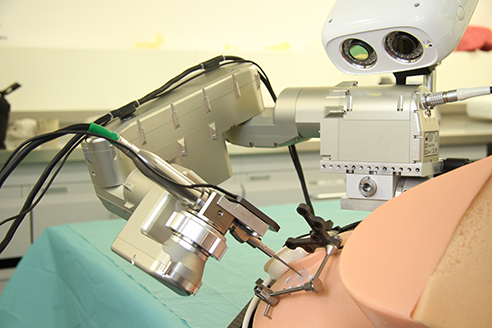
Une équipe de chirurgiens et d’ingénieurs de l’Inselspital, Hôpital Universitaire de Berne et le ARTORG Center for Biomedical Engineering Research, de l’Université de Berne, a développé un robot chirurgical de haute précision pour une implantation cochléaire. Le 15 mars, ils présentent leur première implantation cochléaire robot-assistée dans la revue « Science Robotics ».
Pour implanter un implant cochléaire électronique dans l’oreille d’un patient sourd, le chirurgien doit créer un accès précis derrière l’oreille, à travers la boîte cranienne jusqu’à l’oreille interne. L’électrode qui relie la partie endommagée de l’oreille interne pour permettre au patient d’entendre de noouveau est introduite dans le cochlée. Jusqu’àprésent, cette procédure était effectuée manuellement par des otologistes au moyen d’un microscope afin de visualiserl’accès jusqu’à l’oreille interne.
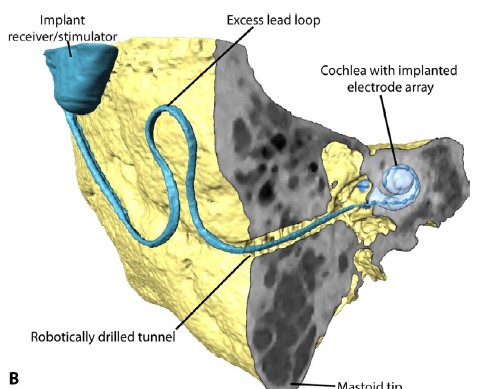
L’objectif de ce projet de recherche bernois était d’étudier la technologie d’implantation cochléaire robot-assistée qui pouvait mener vers une nouvelle procédure d’implantation avec une amélioration des résultats auditifs pour les patients à implantation cochléaire . Les chercheurs ont découvert que l’utilisation d’un logiciel de planification chirurgicale et d’un processus de perçage robotisé pouvait permettre d’accéder à la cochlée à travers un tunnel d’environ 2,5 mm de diamètre en ligne droite en partant depuis derrière l’oreille. Cependant, à cause de la taille et de l’échelle de cette procédure robot-assistée, le robot effectue la procédure de perçage sans que le chirurgien ait besoin d’intervenir directement et manuellement. Le défi à relever pour l’implantation cochléaire robot-assistée était de créer et de développer un système de sécurité très fiable permettant de suivre et de contrôler les activités de perçage du robot au-delà des capacités du chirurgien. De la même manière que les fonctions avioniques permettent à un pilote de piloter un avion à l’aide d’instruments simplement en se basant sur les informations affichées dans le cockpit, le robot chirurgical développé par les chercheurs en implantation cochléaire robot-assistée est conçu pour effectuer des opérations que le chirurgien ne peut pas effectuer manuellement sans l’aide d’un robot.
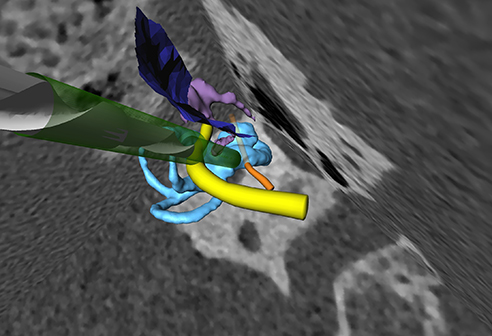
Les développements essentiels ayant donné lieu à la première procédure révolutionnaire sur un patient sont les systèmes de sécurité fiables contrôlés par ordinateur appliqués aux opérations du robot lors du perçage du tunnel dans le côté de la tête du patient. Le trou du tunnel mini-invasif se situe à distance sécure entre le nerf facial et le nerf de la corde du tympan jusqu’e dans la cochlée afin que le fil d’électrode de l’implant puisse être inséré à travers ce passage dans la cochlée à l’angle prévu.
On effectue une navigation en toute sécurité et un perçage dans l’oreille humaine évitant d’endommager les nerfs et les structures microscopiques de l’oreille interne par le biais de trois composants de sécurité encastrés l’un dans l’autre remplaçant la vue, le toucher et l’audition du chirurgien. Prof Weber du ARTORG Center for Biomedical Engineering Research, Université de Berne, expose les grandes lignes des éléments garantissant la sécurité : « Le robot s’appuie sur un nombre de capteurs représentant un système de suivi optique très précis, un capteur pour détecter la résistance qui peut ‘sentir’ la texture de l’os pendant le perçage et une sonde de stimulation nerveuse agissant comme un radar qui envoie de légères impulsions électriques dans l’os, permettant au robot de déterminer s’il est sur la bonne voie ou pas ». Toutes les informations apportées par ces instruments indiquent au chirurgien où se trouve le robot à tout moment garantissant ainsi un perçage en tout sécurité.
« Ce premier implant cochléaire robot-assisté est le résultat de dix ans de recherche multidisciplinaire effectuée par une équipe d’ingénieurs biomédicaux, de neuroradiologistes, de neurologistes, d’audiologistes, de professionnels paramédicaux et de chirurgiens », déclare le Prof. Marco Caversaccio, du département ORL, chirurgie cervico-faciale, Inselspital, Berne. Cette technologie a subi des phases de tests techniques et laboratoires rigoureux pour garantir la sécurité du patient, permettant ainsi à cette technologie complexe de passer des laboratoires aux salles d’opération.
« Nos résultats nous encouragent à penser que nous avons relevé de nombreux défis posés par l’utilisation d’un robot pour les opérations d’implant cochléaire », ajoute Caversaccio. Des développements de suivi, dont l’administration de substances médicales à l’oreille interne, sont prévus. Ces projets d’ingénierie biomédicale translationelle seront soutenus par l’Institut suisse pour la médicine translationnelle et l’entreprenariat : sitem-insel AG (http://www.sitem-insel.ch).
Informations éditoriales:Stefan Weber, Kate Gavaghan, Wilhelm Wimmer, Tom Williamson, Nicolas Gerber, Juan Anso, Brett Bell, Arne Feldmann, Christoph Rathgeb, Marco Matulic, Manuel Stebinger, Daniel Schneider, Georgios Mantokoudis, Olivier Scheidegger, Franca Wagner, Martin Kompis, Marco Caversaccio: Instrument flight to the inner ear, Science Robotics, 15. März 2017, doi: 10.1126/scirobotics.aal4916 |
15.03.2017